Examples
Interactive Windows
Joint Angle Control
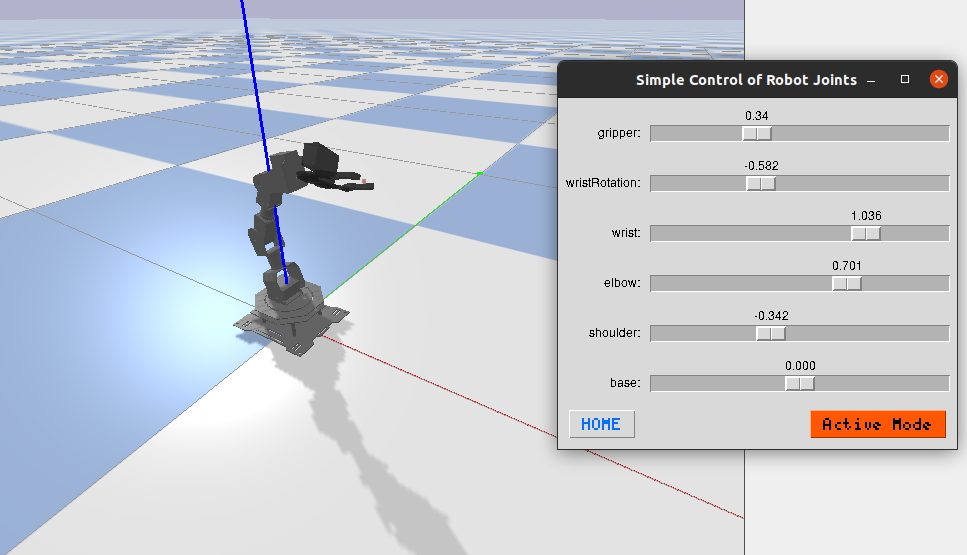
The following terminal command will connect to the robot and generate a pop-up window where you can control each motor in the robot. There are two buttons at the bottom: the one on the left moves the robot to the “HOME” position, the one on the right toggles the robot from active to passive mode. When in passive mode, the window will display the current joint positions (in radians) and you are free to move the robot by hand.
move_arm_with_gui
The image below shows the simulated robot along with the pop up window. If you
want to use the simulator, then use the command move_arm_with_gui --sim.
Recording Trajectories
For designing arm trajectories, you can run the following command in the terminal
record_movements
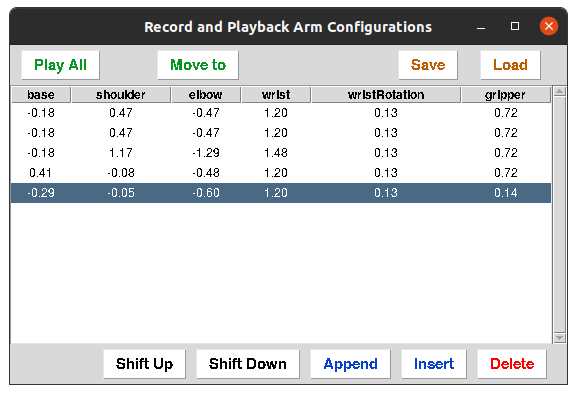
The robot will enter passive mode, allowing you to move it freely around. The pop up windows provide several buttons for creating and running through a sequence of joint positions. Hit “Play All” to move the robot through all rows of joint positions, or hit “Move to” to move the robot to the highlighted row. The robot will return to passive mode after it has stopped executing the motions. You can save the sequences to be loaded and modified at another time using the “Save” and “Load” buttons.
Python Scripts
Hardcoded Arm Movements
create a sequence of arm joint positions and use for loop to go over them
from nuro_arm import RobotArm
robot = RobotArm()
jpos = [0, 0, 0, 0, 0]
for i in range(10):
jpos[1] += i/10
robot.move_arm_jpos(jpos)
Using Feedback from Joint Positions
Here is an example where we use the state of the gripper to determine whether an object was grasped. The program keeps attempting to close the gripper until it detects an object in the gripper (i.e. gripper could not be fully closed), at which point it drops the object off at another location.
from nuro_arm import RobotArm
robot = RobotArm()
grasp_jpos = [-0.2, 0, 0.5, 0, 0]
drop_jpos = [0.2, 0, 0.5, 0, 0]
robot.open_gripper()
robot.move_arm_jpos(grasp_jpos)
while True:
robot.close_gripper()
gripper_state = robot.get_gripper_state()
# if something in gripper, drop it off
if gripper_state > 0.1:
robot.move_arm_jpos(drop_jpos)
robot.open_gripper()
break
robot.open_gripper()
Top-Down Grasping
show IK solution example
Nudging a Cube
show cube detection and movement